

基于时间最优的旋翼飞行器吊运系统运动规划方法
技术简介:
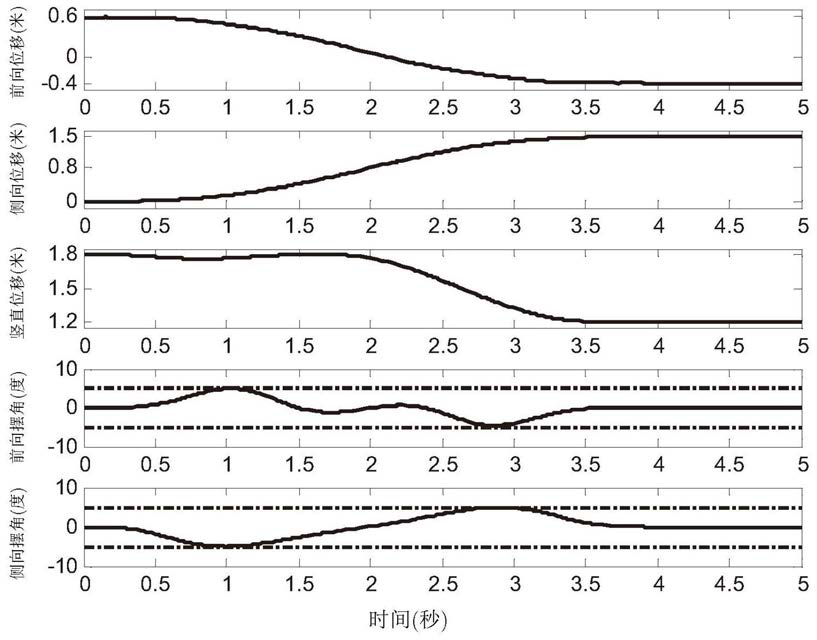
一种基于时间最优的旋翼飞行器吊运系统运动规划方法,能够得到时间最优的飞行器定位与负载消摆轨迹,属于非线性欠驱动机电系统自动控制领域。首先建立完整的系统动力学模型,随后将系统表达为以加加速度为输入的非线性仿射形式。在离散化和近似化处理之后,可以将原本的时间最优运动规划问题转化为标准的非线性规划问题,这一过程中考虑负载摆动、飞行器速度、加速度、加加速度等各种约束。最后,利用序列二次规划方法即可对该问题进行求解。本发明在处理中无需线性化操作,保留了系统原本的属性,且可以加入对系统状态轨迹和输入量的约束;此外,该方法将飞行器加速度设为输入,从而得到加速度连续的轨迹,以免电机振动而影响其使用寿命。
专利信息:
| 专利所属地区 | 专利类型 | 专利号/申请号/登记号 | 专利授权日期 | 专利证书图片 |
|---|---|---|---|---|
| 中国 | 发明专利 | CN201810013743.0 | 2021-02-02 |




微信扫码⇒移动端

微信扫码⇒公众号