

预计到2026年宁波地铁隧道总长里程达400公里,要保障地下隧道结构安全的长期安全稳定运行,地铁隧道的运行维护面临着巨大压力。为了及时掌握轨道交通结构的变形情况,及时消除安全隐患,对轨道交通结构采取适宜的变形监测是非常必要的,可实现结构形态的实时动态监测预警,保障轨道交通的运营安全。现有全站仪测量机器人与物联网传感器形变监测技术无法满足长距离曲线地铁隧道全参数(位移、沉降、收敛)、亚毫米、实时变形自动化监测需要。亟需开发一款适合多级组网的机器视觉形变监测仪,基于机器视觉深度学习实现精密实时动态形变识别测量。
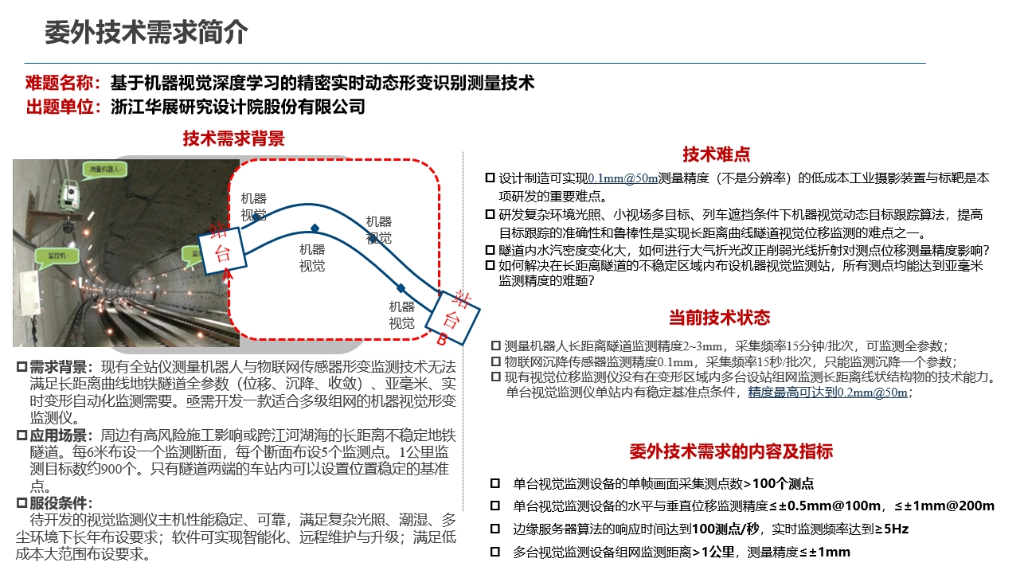
1.设计制造可实现0.1mm@50m测量精度(不是分辨率)的低成本工业摄影装置与标靶;
2.研发复杂环境光照、小视场多目标、列车遮挡条件下机器视觉动态目标跟踪算法,提高目标跟踪的准确性和鲁棒性,实现长距离曲线隧道视觉位移监测;
3.修正因隧道内水汽密度变化大等环境因素对测量精度的影响;
4.解决在长距离隧道的不稳定区域内布设机器视觉监测站,所有测点均能达到亚毫米监测精度。
项目团队自从2009年宁波启动轨道交通建设以来,持续参与宁波轨道交通全部线路的总体设计、工点与系统设计、岩土工程勘察、建设期监测测量及风险咨询、运营期以及轨道交通控制保护区的监测监控任务。拥有多专业 、多学科、跨界融合、链条完整的研发团队,致力于地铁隧道智慧检测、信息化管控平台及安全评估关键技术的研究,编制了多项行业规范及地方标准,具备引领相关前沿技术研发的能力。
项目团队此前开展了三维激光扫描隧道结构变形与病害检测系统、盾构施工信息化管控平台、基坑工程安全风险分级管控平台等多个科研项目,自主研发的轨道式三维激光扫描测量检测系统成功应用到宁波轨道交通5号线运营监测、1号线、3号线、4号线地保安全评估监测、2号线病害整治现状检测等项目中。
1.多台机器视觉精密组网测量距离大于1公里;
2.多台机器视觉精密组网测量位移精度≤±1mm;
3.全网监测点的同步观测时间差≤0.2秒;
4.城市轨道交通全时域智能监测分析系统响应时间≤200ms;
5.地铁隧道形变监测实现7×24小时连续监测;
6.单台机器视觉监测设备,100米以内变形监测精度≤±0.5mm,200米以内变形监测精度≤±1mm;
7.单台机器视觉监测边缘服务器监测点的实时监测频率≥5Hz;
8.单台机器视觉监测边缘服务器算法响应时间达到5000个测点/秒。
1.开发出一套支持多级组网的机器视觉形变监测设备硬件;
2.隧道形变监测过程中的特征点自动识别和跟踪技术算法;
3.隧道形变监测视觉图像畸变实时纠正技术算法;
4.隧道形变目标标亚像素定位重构技术与高精度关键技术算法;
5.多台视觉监测机器人组网测量关键技术算法。




