

基于负载广义位移的双无人机吊运系统非线性自适应控制方法
技术简介:
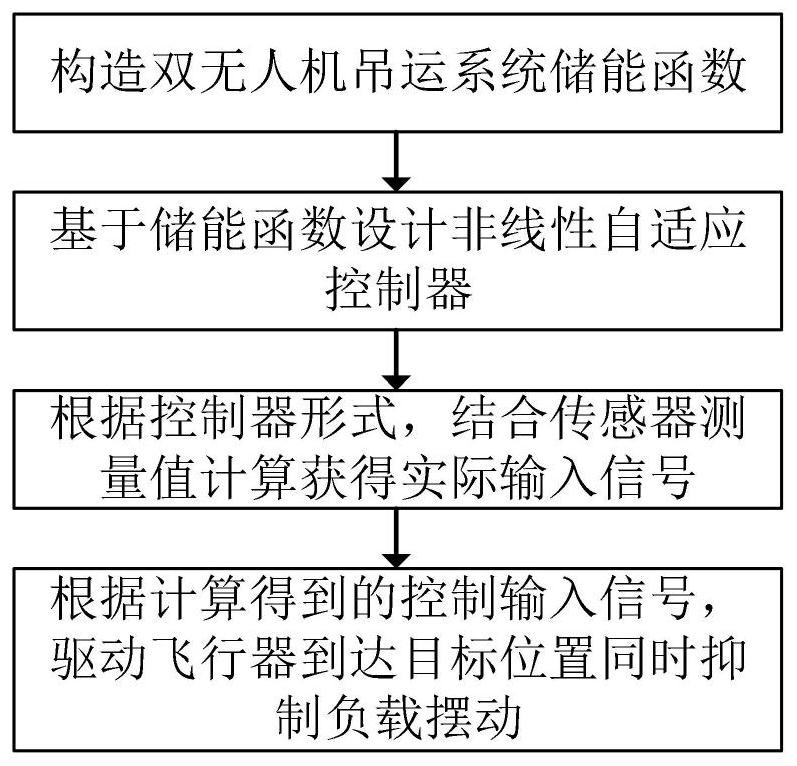
一种基于负载广义位移的双无人机吊运系统非线性自适应控制方法,属于机电系统控制领域。该方法包括:根据系统二维平面模型,无需线性化与其他简化操作,提出了一种新颖的非线性自适应控制方法。该方法在考虑飞行器所受空气阻力的同时,通过引入负载摆角状态耦合,在保障完成飞行器定位任务的基础上,加快了对负载摆动的抑制。实验结果表明,所提方案在抑制负载摆动以及快速完成飞行器定位任务方面具有良好的性能。
专利信息:
| 专利所属地区 | 专利类型 | 专利号/申请号/登记号 | 专利授权日期 | 专利证书图片 |
|---|---|---|---|---|
| 中国 | 发明专利 | CN202110905820.5 | 2022-06-24 |




微信扫码⇒移动端

微信扫码⇒公众号