

技术简介:
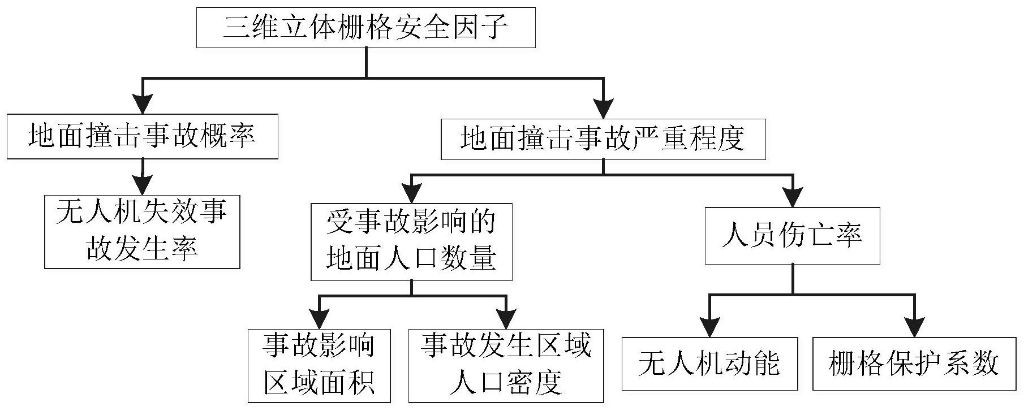
一种三维无人机安全航路规划方法。其包括对无人机飞行空域空间进行三维立体栅格化,获得多个正方体形栅格;以栅格安全因子定量化描述栅格中无人机的飞行风险;构建基于栅格安全因子和无人机航路距离的航路规划总成本估价期望函数;以航路规划总成本估价期望函数作为A*算法的目标函数而对A*算法进行改进,利用改进A*算法进行迭代计算,最终获得航路安全与航路成本双重优化后的三维期望飞行路径等步骤。本发明可使规划的无人机三维航路具备地面人员安全屏障的作用。更进一步在战略阶段减缓无人机坠毁伤人事故的严重后果,做到风险缓解的前移。
专利信息:
| 专利所属地区 | 专利类型 | 专利号/申请号/登记号 | 专利授权日期 | 专利证书图片 |
|---|---|---|---|---|
| 中国 | 发明专利 | CN202011010068.X | 2022-10-04 |




微信扫码⇒移动端

微信扫码⇒公众号